2024年8月30日
- DOBOT CR Series
- ハードウェア
DOBOT CR ハンドガイドモードの使い方
ハンドガイドモードを使うと、ロボットアームを手動で操作することが可能です。このモードではプログラムでの細かい設定が不要となるため、直感的に操作を行うことができます。
操作手順
- Dobot Studio Proにて接続(イネーブル)された状態で操作を行います。

- ハンドガイドボタンを押します。
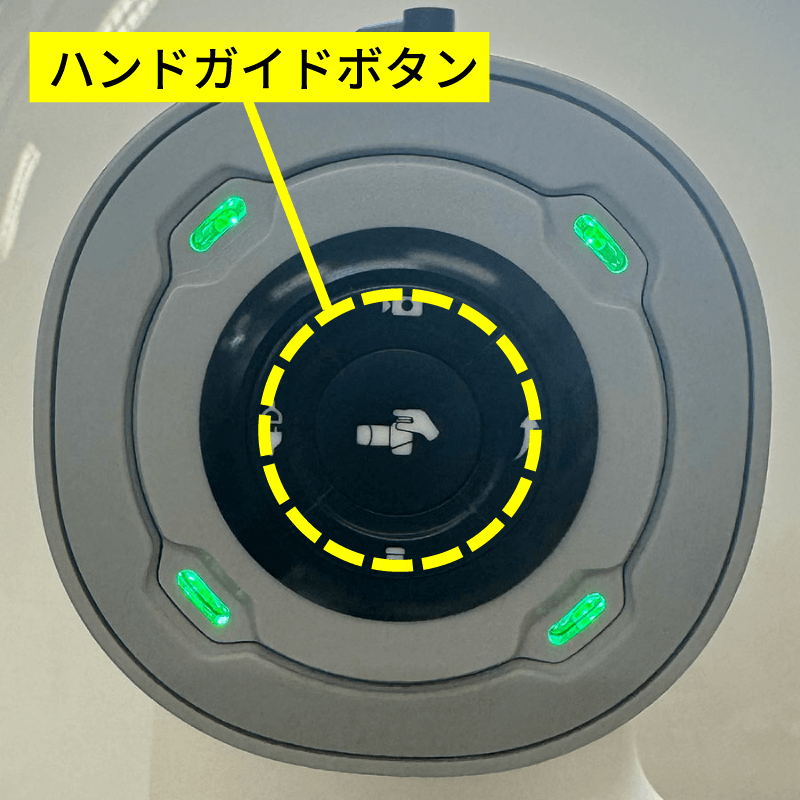
- ランプが緑から青点滅に変わったら、自由にアームを動かせるようになります。
可動域内でゆっくり動かしてください。この間、アプリでの操作はできなくなります。


※アームがどちらにも回転する可能性があるため、PC画面上で現在の角度を確認し、適切な回転方向を決定する必要があります。
各ジョイントの可動域
DOBOT CR3の各ジョイントの可動域は、以下のとおりです。
J1 -360°~ +360°
J2 -360°~ +360°
J3 -155°~ +155°
J4 -360°~ +360°
J5 -360°~ +360°
J6 -360°~ +360°
可動域外に無理に動かそうとすると、故障の原因になります。コントロールパネルを見ながら操作を行ってください。
- 任意の場所に移動したら、もう一度ハンドガイドボタンを押すことで固定することができます。
(2024/8/30 現在)