2024年10月11日
- DOBOT MG400
- ハードウェア
DOBOT MG400 衝突検知機能の使用方法
DOBOT MG400は稼働中に衝突を検知した場合、自動的に動きを停止する機能を備えています。この機能により、機械の損傷や人身事故を防ぐことができます。
衝突検知によりアームが停止した場合
衝突検知が発生すると、システムは以下のような警告文を表示し、アームが停止します。
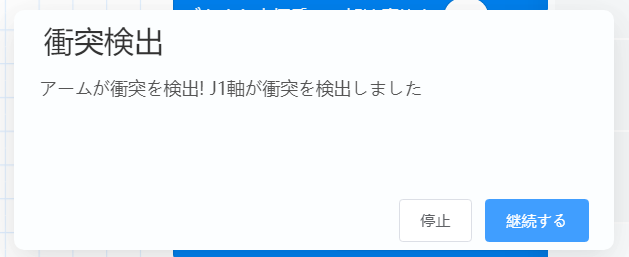
物体に衝突しない位置にMG400を移動させ、『継続する』を押すことでプログラムが再開します。『停止』を押すとプログラムが終了します。
衝突検知の設定
設定>セキュリティ設定 より、衝突検知に関する詳細設定を変更することができます。
衝突検知
衝突検知機能をONまたはOFFに設定できます。(安全のため、常にONにしておくことをおすすめします。)
衝突検知感度
レベルを調整することで、軽い衝突でも停止するか、あるいは多少の接触を許容するかを選択できます。 高感度設定(レベル5)では小さな衝突でも即座に停止し、低感度設定(レベル1)では大きな衝突のみで停止します。
※安全のため、特別な事情がない場合はレベル5に設定してください。
衝突検知後の回復方法
衝突検知後の動作を『5秒後に再開』『一時停止』『停止』の中から選択できます。
- 5秒後に再開: 衝突後5秒たつとプログラムが再開します。
- 一時停止: 衝突が解消されると再びプログラムを再開します。
- 停止: 衝突が発生するとプログラムを停止します。

Blocklyでの設定
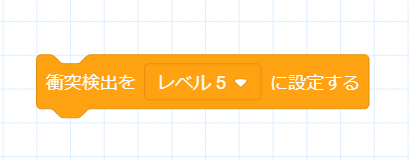
ブロックプログラミング内には、衝突検知に関連するブロックがあります。過敏な設定が動作に支障をきたしている場合など、やむを得ないときに使用することができます。ただし、これらはプログラム実行中のみ一時的に設定が変わるものであり、基本設定は変更されません。
(2024/10/11 現在)


