2025年4月15日
- DOBOT MG400
- ハードウェア
DOBOT MG400 最大可動域について
アームの可動範囲
DOBOT MG400は4軸のロボットアームです。各軸にはそれぞれ可動域が設けられており、アームの可動範囲に影響します。可動域外へアームを動かすと故障や事故の原因になりますので、範囲に気を付けながら操作してください。以下はMG400の可動範囲です。
*画像内で使用しているXYZの座標は空間を把握しやすくするために設けたものです。
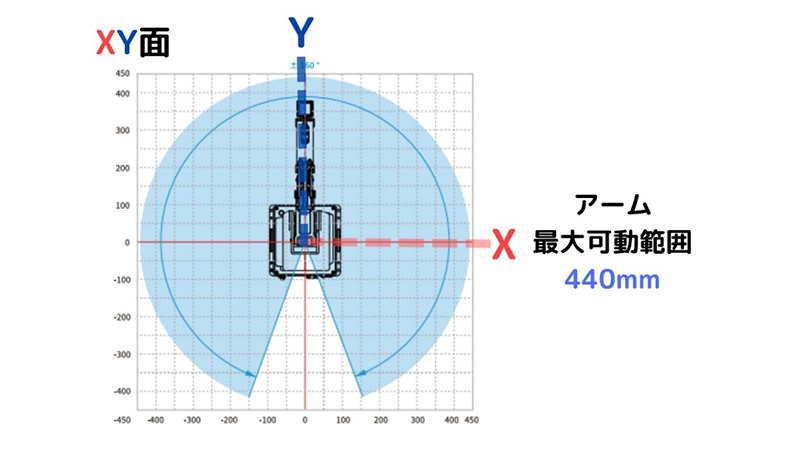
図1.上から見た時のMG400の最大可動範囲
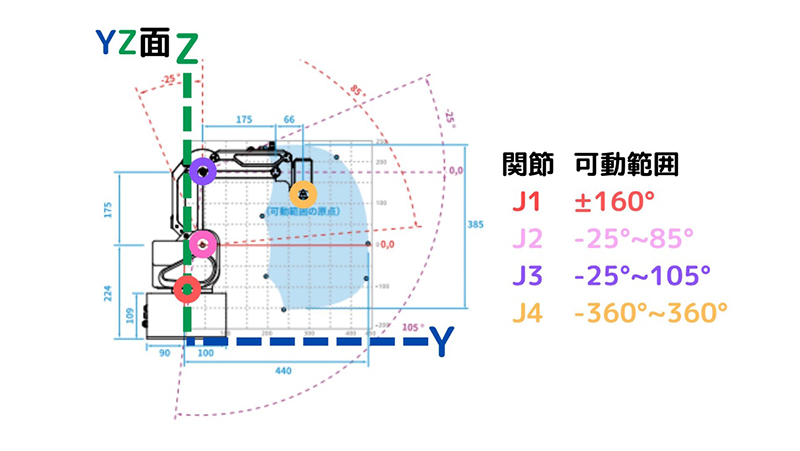
図2.横から見た時のMG400の可動範囲
アームの可動域外エラー
アームを手動やプログラム上などで動かす際は、可動範囲内で動かしてください。
可動範囲を超過すると可動域外エラーとなり、アームが停止します。エラーが発生した際は以下の手順で解除してください。
- アームを持ちUNLOCKボタンを押します。

- UNLOCKボタンを押しながらアームを可動域内へ動かします。
- ステータスランプが緑色になったら、手を放します。
参考:アームが可動している様子
図3.正面から見た最大可動範囲での動作
図4.横から見た最大可動域での動作②
図5.旋回時の最大可動域での動作
(2025/4/15 現在)


