2025年4月15日
- DOBOT MG400
- ハードウェア
- 製品情報
DOBOT MG400 原点復帰と箱への収納方法
原点復帰の手順
パソコン画面上(ソフトウェア)での操作
- Dobot Studio Proの画面左上のメニュー
 をクリック
をクリック - 設定の選択肢から
 を選択
を選択 - 基本設定画面の
 を長押し
を長押し - アームが停止したら原点復帰完了
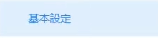
手動の場合
↑ 原点復帰後の状態 ↑
各種パーツの取り外し
緊急停止ボタン/IOコネクタ
① 左右のネジが固定されていないことを確認する
(固定されている場合、マイナスドライバで緩める)

② コネクタの左右を握り、取り外す

エアチューブ

LANケーブル

エンドエフェクタ (取り付けられている場合)
- *ネジを緩めるとエンドエフェクタがそのまま落下するため、 支えながら作業を行ってください

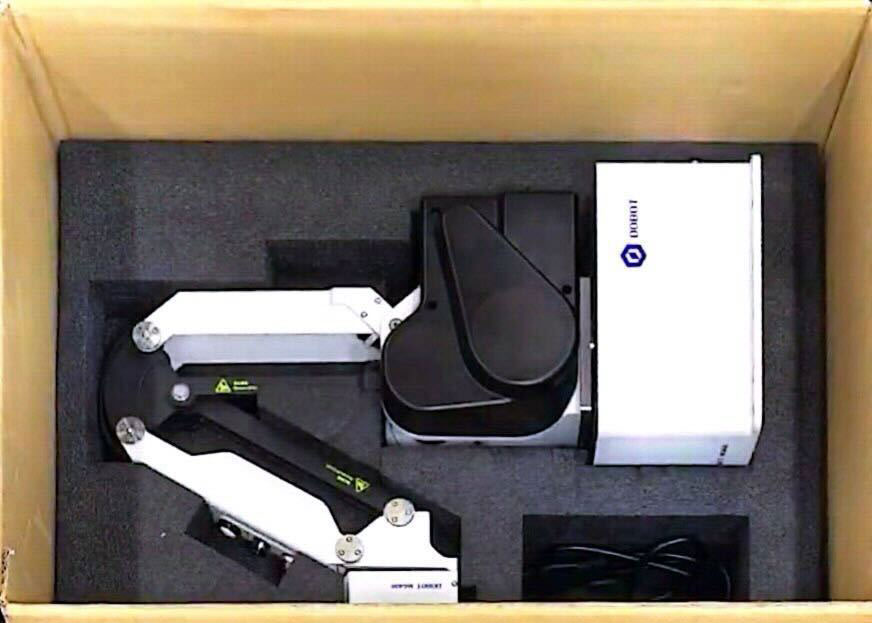
箱へ収納
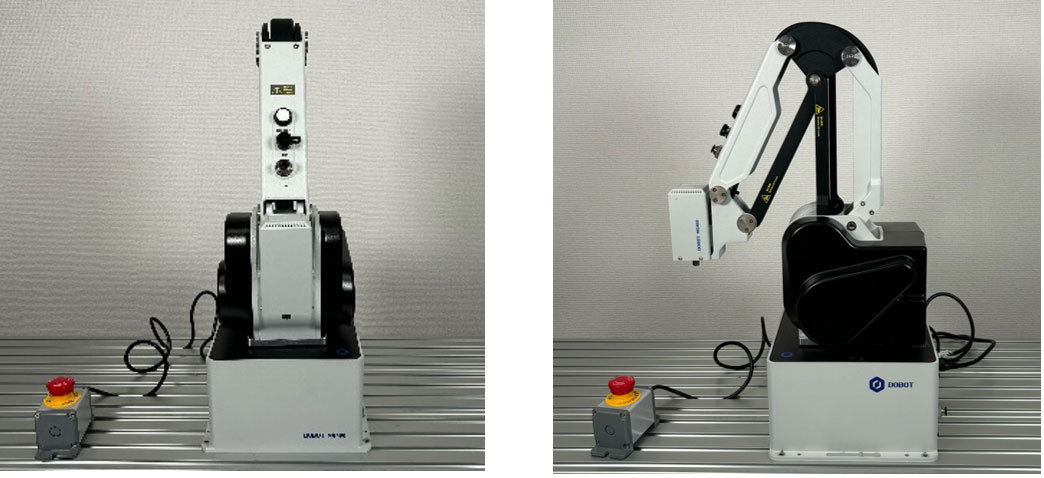
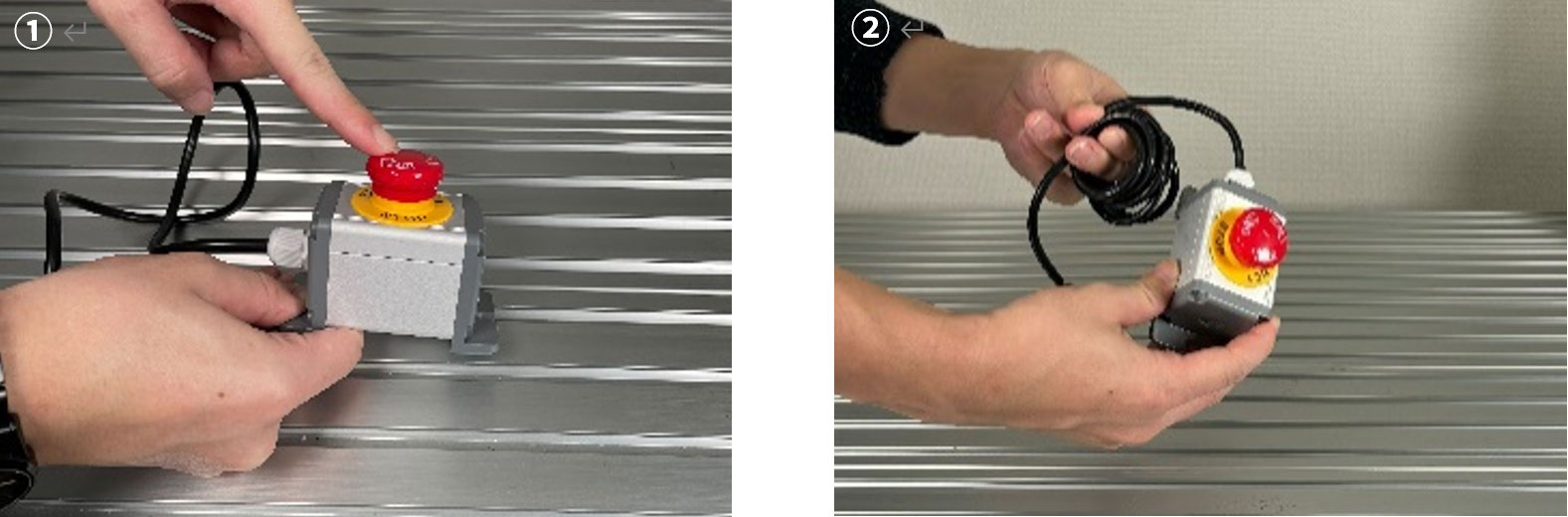
非常停止ボタン
① ボタンは押し込んだ状態にする
② コードは指二本分の幅で巻き取る
② コードは指二本分の幅で巻き取る
収納位置確認

本体を箱へ収納
注意点
- 軽量とはいえ8kgもある製品ですので、箱から取り出す際は2名いると作業を容易に進めることが出来ます
- 本体台座とアームを繋ぐ関節は、電源に接続されていなくても回転しますので、十分に注意して収納/取り出しを行ってください
- 本体を収納する際に引っかかりを感じたら、無理に押し込むことはせず、再度電源を入れて原点復帰の作業を行ってから収納してください。
(収納用枠組みの破損やアーム本体の変形に繋がる恐れがあります)
次回起動時の注意点と対処方法
可動域限界エラー
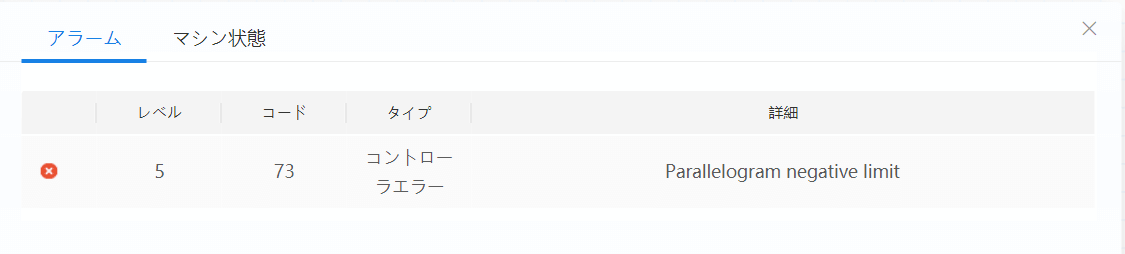 (エラー例)
(エラー例)
[なぜこのエラーが出るのか]
ロボットアームを箱に収納する為には一部関節を可動域の限界値付近まで動かす必要があります。その為、次回起動時に始めから可動域限界によるコントローラエラーが表示される場合があります。[解除方法]
DOBOT Studio Pro上でアラートを解除したうえで、① DOBOT Studio Pro 上のコントローラからアームを可動域内に戻す
② ダイレクトティーチング機能をONにし、人の手で直接可動域内に移動させる
[対策]
ロボットアームの可動域から出ない状態で固定し、収納する必要があります非常停止ボタン押下エラー
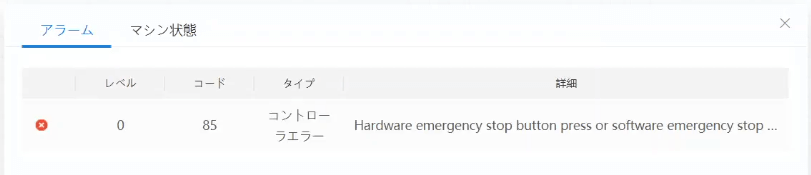 (エラー例)
(エラー例)
[なぜこのアラートが出るのか]
非常停止ボタンを収納する際、ボタンを押下した状態で収納する必要があります。次回ロボットアームセッティング時に非常停止ボタンの押下状態を解除せずに電源を入れてしまうと、非常停止ボタンが押下された際にでるエラーが即座に表示されてしまいます。[解除方法]
DOBOT Studio Pro上からアラートを解除してください[対策]
ロボットアームセッティング時に必ず非常停止ボタンの押下状態が解除されていることを確認したうえで、電源を入れてください。(2025/4/15 現在)


