2024年11月1日
- DOBOT MG400
- 製品情報
DOBOT MG400 ロボットアームに関する禁止事項
ロボットアームは作業の効率化に役立ちますが、適切な環境・ルールの中で使用しなければ周りのデバイスや人体に対して危害を加える可能性があります。本記事ではロボットアームに関する禁止事項に触れ、それに対する正しい操作および事前対策に関して記述しています。
*これは使用者の安全意識向上の手助けを目的としたものであり、使用者の安全を完全に保証するものではありません
設置環境の禁止事項
十分な強度を持った土台にしっかり固定されていない
ロボットアームに限らず、電子機器の近くに液体や磁力を持つ物を置いておくことは重大な故障や事故に繋がる危険性があります。
稼働にあたって十分なスペースが確保されていない
ロボットアームの性能を十分に発揮できないだけでなく、衝突時に本体の故障や人体への被害が考えられる為最低限ロボットアームの稼働範囲分のスペースを確保しておく必要があります。
十分な強度を持った土台にしっかり固定されていない
ロボットアームの種類によっては自立が困難なものや、アームを回すと転倒してしまうものもあります。周りの安全確保やロボットアームの故障防止の為にも、土台にしっかりと固定する必要があります。
可動範囲内の禁止事項
稼働範囲内に人や意図していない障害物が存在する状態で、動作を開始させる
ロボットアームの稼働範囲内に意図していない人や物が存在する状態でアーム動作を開始させると、動作に不備が生じ、ロボット本体や扱う商品の欠損、人との接触事故につながる可能性があります。稼働前には必ず人がいないかの確認を行い、物がある場合はそれを加味したプログラムになっているのか慎重に判断することが重要です。
ロボットアームが意図せず停止した際に、完全停止を確認しないままに可動範囲内に入る
ロボットアームが何らかのエラーで一時停止した場合、ロボットの見た目だけでなくシステム的に確実に停止したことが確認できるまで、ロボットアームの稼働範囲内に入ってはいけません。再起動したロボットとの接触事故に繋がる恐れがあります。緊急停止ボタンを押す、もしくはイネーブル状態を解除してから作業を開始することを推奨します。
稼働範囲内でイヤホンや耳栓など、周囲の状態が把握できないまま作業を行う
ロボットアーム教示中の自分に近づいてくる人に気づくことが出来ない場合や、動作開始目前のロボットアームに不用意に近づいてしまう等、重大な事故に繋がる可能性が極めて高くなります。現場では常に周囲を把握できる状態を維持する事を推奨します。
作業者の禁止事項
不十分な知識のまま一人で作業を行う
設定や動かし方、エラーに対する知識が不足している場合、ロボットアームの故障や自身の怪我に繋がります。
またロボットアームによっては産業用ロボットに分類されるものも存在し、特定の講習を完了していなければ扱ってはいけません。まず必要な知識の収集を行うことが重要です。
ロボットアーム動作中に目を離す
特に教示完了後、初めてロボットアームを稼働させる際などは絶対に目を離してはいけません。万が一プログラムに不備があり、想定していない動作を行ってしまった際に即座に非常停止ボタンを押す必要があります。
非常停止ボタンがロボットアーム動作中手元にない
ロボットアームがこちらの想定していない動きをした際や、不注意により人と接触しそうになった際に即座に非常停止ボタンを押せるよう、教示途中などは特に非常停止ボタンを手元に置いておく必要があります。
安定動作確認後も万が一に備え、いざとなったら即座に押せる場所に設置し、作業者全体に設置場所を共有しておくことが重要です。
ロボットアームの設定に関する禁止事項
衝突検知機能OFFの状態で動作させる/衝突検知レベルを確認しないままに動作を開始させる
衝突検知機能はそのレベルによって、どの程度の衝撃でロボットアームの動作を停止させるかが変化します。
動作速度が速いにも関わらずこの機能がOFFの場合や、検知レベルが低い状態で稼働させていると人や商品に衝突しても停止することなく、被害が及ぶ可能性があります。他にもロボットアームの積載重量以上の物体を押し始めてしまい、アームを動かすモータが損傷する場合もあります。基本的に衝突検知機能はOFFにせず、検知レベルも最大値の5に設定してください。
教示後、初めて動作させる際に速度設定が最大になっている
作業者がロボットアームの教示に慣れていても、かならず完璧なプログラムを書けているとは限りません。
教示後初めて動作させる際などは必ず速度設定を遅くすることで、万が一想定していない動きをした場合も即座に非常停止させることができ、事故や怪我の防止に繋がります。
DobotStudioProを使用している場合、速度は画面右上の「グローバルスピード」で簡単に調節できます。
イネーブルスイッチ起動時に設定する積載重量に関して
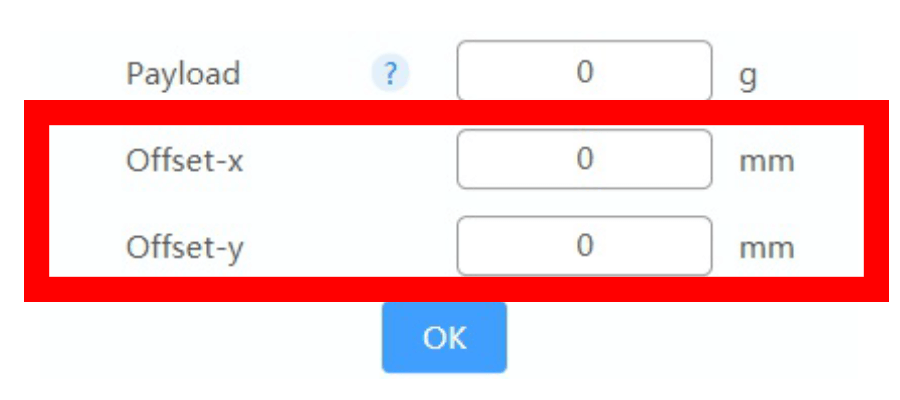
荷重設定画面下部の画像
積載重量はロボットの最大積載重量を超えてはいけません。またイネーブルスイッチ起動時の荷重設定が正しくないと、ドラッグ中に衝突検出異常アラームが鳴ることや、ロボットが制御不能になる可能性があります。
偏心工具が取り付けられていない場合は、赤枠内のように X-offsetもY-offsetも0㎜に設定してください。
(2024/11/1 現在)


