2024年11月1日
- DOBOT MG400
- ソフトウェア
DOBOT MG400 複数存在する速度設定方法の解説
速度設定とは
速度設定は以下の方法で行う事ができます。
- グローバルスピード
- モーションパラメータからの速度・加速度設定
- 速度コマンドの割合設定
速度設定を行う事で、アームの稼働速度を任意に変更することが可能です。これにより、作業環境によっては業務の効率をさらに高めることが出来ます。
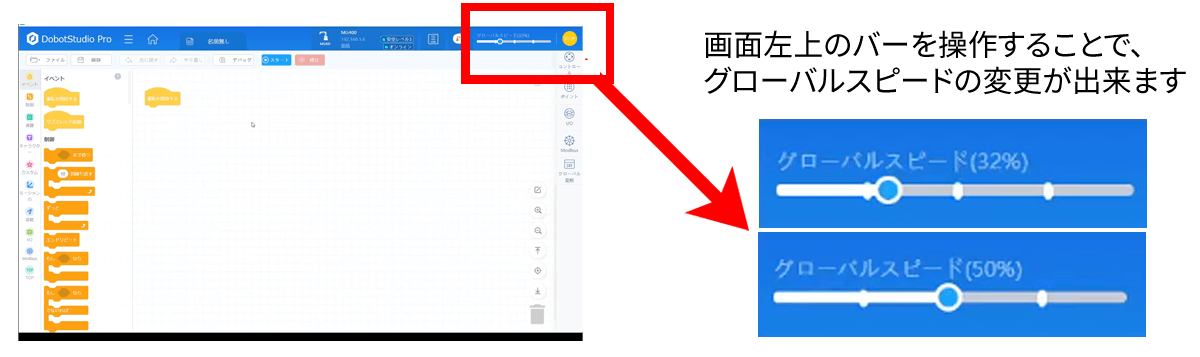
グローバルスピード
アーム稼働時の速度の基本となるものです。
モーションパラメータから速度・加速度設定
- ジョイント部の速度・加速度
アームの関節部にあたるジョイントの稼働速度・加速度を任意に設定することが可能です。 - デカルト座標系での速度・加速度
デカルト座標系とは互いに直交している直線が座標軸となる座標系で、その座標軸上で移動する際の速度・加速度を任意に設定することが可能です。
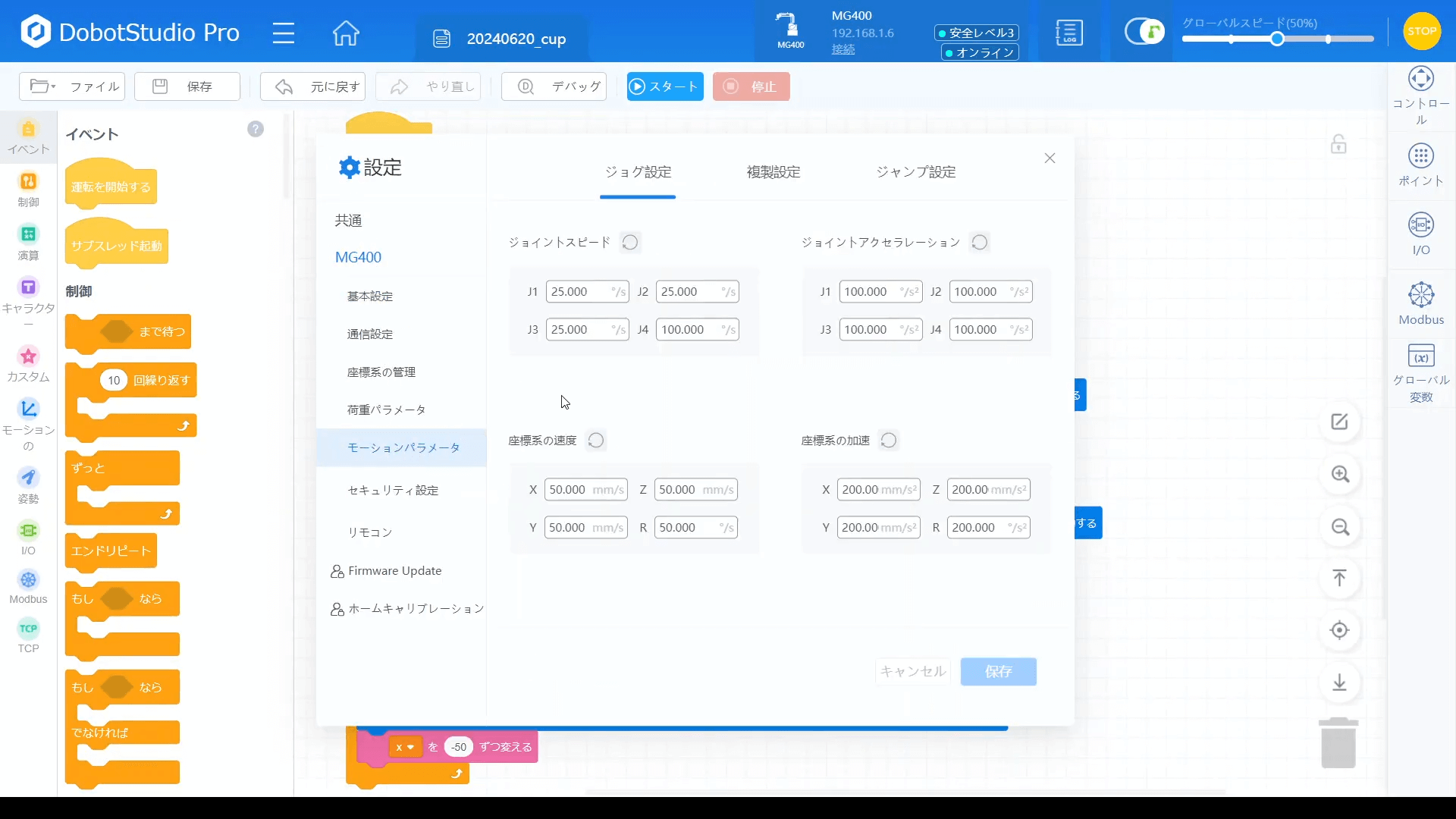
[設定方法] ジョイントもデカルトも同様の方法で設定可能
- Dobot Studio Proの画面左上のメニュー
 をクリックします。
をクリックします。 - 設定の選択肢から
 を選択します。
を選択します。 - モーションパラメータ画面から、ジョイントとデカルト座標系の速度・加速度を設定可能です。
速度コマンドの割合設定
モーションパラメータで設定した速度・加速度を、プログラミング上でコマンドを用いて容易に調節することが可能です。
[設定方法]
DobotBlockly画面の左側にある「モーションの」を選択し、
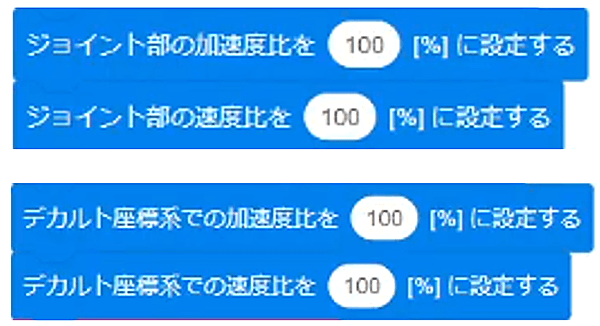
上記の四種のコマンドを用いることで、プログラミング上で速度・加速度の設定が可能です。
実際の動作速度の求め方
- ジョイントを使用する場合:
実際のジョギング速度 = 設定速度/加速度 × グローバル速度比
例: ジョイント速度が7°/s で、グローバル速度比が50%の場合、実際のジョギング速度は
7°/s × 50% = 3.5°/s となります
- デカルト座標系を使用する場合:
実際の動作速度 = 設定速度/加速度 × グローバル速度比 × プログラム上の速度コマンドの設定割合
例: 座標系速度が50mm/s、グローバル速度比が50%、プログラミング時の速度コマンドの設定割合が80%の場合、実際の動作速度は
50mm/s × 50% × 80% = 20mm/s となります。
(2024/11/1 現在)


