2025年6月20日
- DOBOT MG400
- ソフトウェア
- ハードウェア
DOBOT MG400 C++ SDK 環境構築から実行まで
プログラム概要
本プログラムは左右にアームを動かすプログラムになります。
ループ処理をつかっているため、左、右、左・・・・・・と交互に繰り返し動作します。
システム構成概要
WindowsPC上にROS環境構築し、サンプルプログラムをビルドし、シミュレータ環境で実⾏します
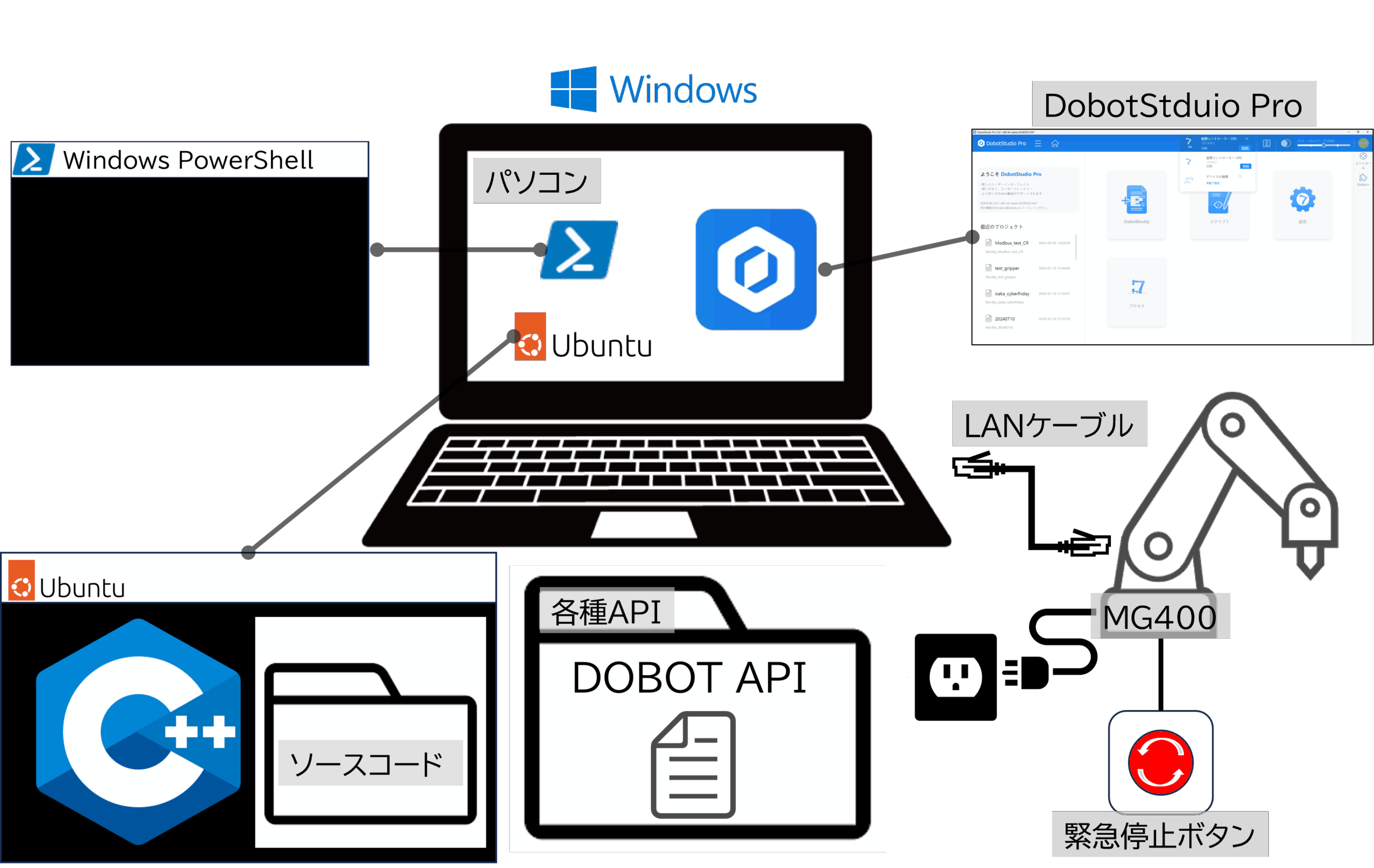
⽤意するもの
ハードウェア
- DOBOT MG400 (本マニュアルではMG400)
- WindowsPC (本マニュアルではWindows11)
・空きストレージ 10GB以上
・メモリ 8GB以上
ソフトウェア
- DobotStudio Pro バージョン2.8.3
- Windows PowerShell
- Ubuntu リリース20.04 LTS
- Robot Operating System 1 バージョンNoetic(以降ROSと表記)
- ソースコード
・実⾏する動作プログラム- 各種API
・https://github.com/Dobot-Arm/TCP-IP-4Axis-CPP - 各種API
事前準備
- MG400を起動
- PCとMG400をLANケーブルで接続する
- コントローラーのLAN1に接続する
- DobotStudioProでMG400をEnableにする
- DobotStudioProの設定->リモコンからTCP/IP2回開発を選択し適応をクリックする
⼿順概要
- Ubuntuインストール
- 環境構築
- ソースコード作成
- ビルド
- 実⾏
下記から詳細⼿順を参照します。
1. Ubuntuインストール
Windows PowerShellを管理者権限で起動し、下記コマンドを実⾏する
ディストリビューションをインストール
wsl --install -d Ubuntu-20.04
インストールまで10分ほどかかる場合があります。 また、インストール後再起動を求められた場合、PCを再起動しUbuntuを起動させてから次の⼿順に移ります。
ユーザー名とパスワードを設定
Installing, this may take a few minutes ... (省略) Enter new UNIX username:(任意のユーザー名を入⼒) New password:(任意のパスワードを入⼒) Retype new password:(設定したパスワードを入⼒)
下記のような表記になっていればUbuntuのインストールは完了です。
(ユーザー名)@(マシン名):~$
このまま⼿順2に移⾏します。
2. 環境構築
Ubuntu上で下記コマンドを実⾏する
作業⽤ディレクトリを作成
(ユーザー名)@(マシン名):~$ mkdir mg400_cpp_workspace
作業⽤ディレクトリへ移動
(ユーザー名)@(マシン名):~$ cd mg400_cpp_workspace
Githubから各種API取得
(ユーザー名)@(マシン名):~$ git clone https://github.com/Dobot-Arm/TCP-IP-4Axis-CPP
過去にGithubから取得しており削除したい場合
(ユーザー名)@(マシン名):~$ rm -rf TCP-IP-4Axis-CPP
このまま⼿順3に移⾏します。
3. ソースコード作成
Ubuntu環境内で展開したAPIフォルダ「TCP-IP-4axis-CPPCppDemo」中に動作プログラム「DobotTcpDemo.cpp」を下記の通り作成します。
サンプルプログラムのご提供をご希望の方は、下記メールにてお問い合わせください。
4. ビルド
Ubuntu上で下記コマンドを実⾏する。
ビルド対象があるディレクトリへ移動
(ユーザー名)@(マシン名):~$ mkdir mg400_cpp_workspace
ビルドコマンドを実⾏
(ユーザー名)@(マシン名):~$ cd mg400_cpp_workspace
下記のようになりましたらビルド完了です。
[ 11%] Building CXX object CMakeFiles/DobotTcpDemo.dir/DobotTcpDemo.cpp.o [ 22%] Building CXX object CMakeFiles/DobotTcpDemo.dir/api/BitConverter.cpp.o [ 33%] Building CXX object CMakeFiles/DobotTcpDemo.dir/api/Dashboard.cpp.o [ 44%] Building CXX object CMakeFiles/DobotTcpDemo.dir/api/DobotClient.cpp.o [ 55%] Building CXX object CMakeFiles/DobotTcpDemo.dir/api/DobotMove.cpp.o [ 66%] Building CXX object CMakeFiles/DobotTcpDemo.dir/api/ErrorInfoBean.cpp.o [ 77%] Building CXX object CMakeFiles/DobotTcpDemo.dir/api/ErrorInfoHelper.cpp.o [ 88%] Building CXX object CMakeFiles/DobotTcpDemo.dir/api/Feedback.cpp.o [100%] Linking CXX executable DobotTcpDemo [100%] Built target DobotTcpDemo
5. 実⾏
緊急停⽌ボタンを解除します。 Ubuntu上で下記コマンドを実⾏する。
プログラム実⾏
「TCP-IP-4Axis-CPPCppDemo」にいる状態で下記コマンドを実⾏する
(ユーザー名)@(マシン名):~$ bash runDemo.sh
シャットダウン⽅法
Ubuntuターミナル上でCtrl+Cキーを押し、プログラムを終了させます。
(2025/06/06 現在)


