2025年6月20日
- DOBOT MG400
- ソフトウェア
- ハードウェア
DOBOT MG400 Python SDK 環境構築から実行まで
プログラム概要
本プログラムは左右にアームを動かすプログラムになります。
ループ処理をつかっているため、左、右、左・・・・・・と交互に繰り返し動作します。
システム構成概要
WindowsPC上にROS環境構築し、サンプルプログラムをビルドし、シミュレータ環境で実⾏します
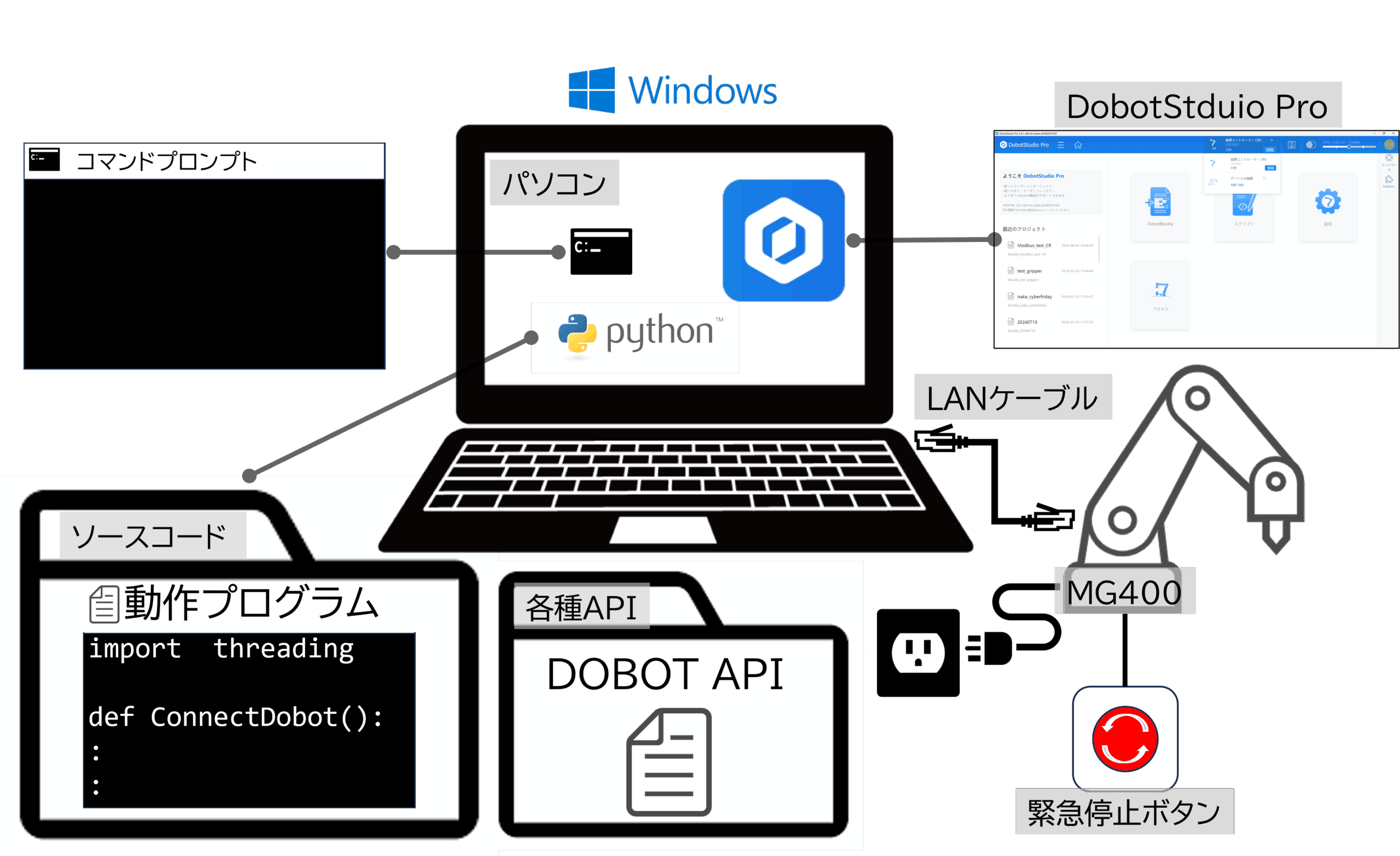
⽤意するもの
ハードウェア
- DOBOT MG400 (本マニュアルではMG400)
- WindowsPC (本マニュアルではWindows11)
・空きストレージ 10GB以上
・メモリ 8GB以上
ソフトウェア
- DobotStudio Pro バージョン2.8.3
- コマンドプロンプト
- Python 3.12.7
- ソースコード
・実⾏する動作プログラム- 各種API
・https://github.com/Dobot-Arm/TCP-IP-4Axis-Python - 各種API
事前準備
- MG400を起動
- PCとMG400をLANケーブルで接続する
・コントローラーのLAN1に接続する - DobotStudioProの設定->リモコンからTCP/IP2回開発を選択し適応をクリックする
- MG400 コントローラーファームウェアが1.6.0.0以上に更新する
・更新⼿順︓https://robot.afrel.co.jp/dobot/technology-dobot/mg400/software-mg400/63489/
⼿順概要
- Pythonインストール
- 各種APIダウンロード
- ソースコード作成
- 実⾏
下記から詳細⼿順を参照します。
1. Pythonインストール
インストーラー取得
下記リンクにアクセスし「Windows installer (64-bit)」をクリックする。
https://www.python.org/downloads/release/python-3127/インストーラー起動
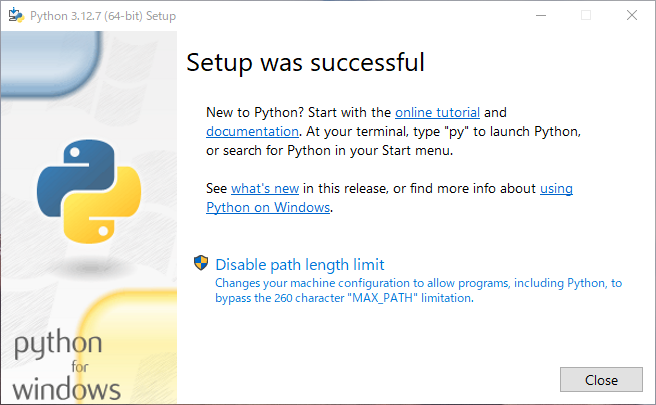
インストーラーを管理者で実⾏する、下図の画⾯になるのでAdd python.exe to PATHに必ずチェックを⼊れてInstall Now をクリックする。

しばらく待機してこの画⾯になったらインストール完了です。
2. 各種APIダウンロード
下記リンクにアクセスしzipファイルとしてダウンロードします。
https://github.com/Dobot-Arm/TCP-IP-4Axis-Python
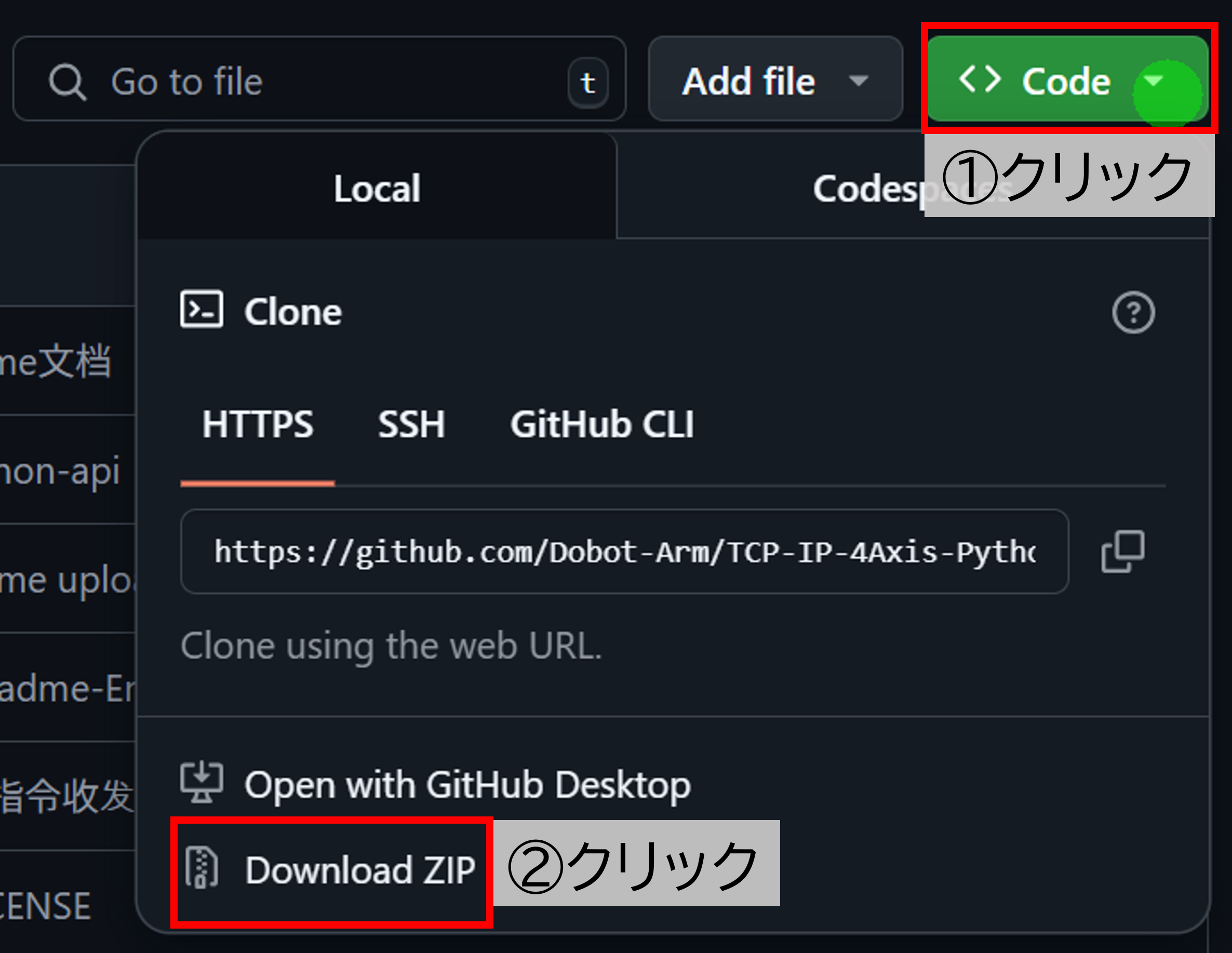
zipファイルは任意の場所に展開してください。 この後のソースコード作成と実⾏に必要なため展開場所はメモしてください。
3. ソースコード作成
展開したAPIフォルダの中に動作プログラム「sample_00.py」を作成します。
サンプルプログラムのご提供をご希望の方は、下記メールにてお問い合わせください。
4. 実⾏
緊急停⽌ボタンを解除します。
コマンドプロンプトを起動し、APIフォルダの中にcdコマンドを使って移動します。
C:Users(ユーザー名) > cd (APIフォルダのパス)
移動後、pythonコマンドを使って実⾏します。
C:Users(ユーザー名)(APIフォルダのパス) > python sample_00.py
シャットダウン⽅法
コマンドプロンプトの画⾯を⼀度クリックし、Ctrl+Cキーを押し、プログラムを終了させます。
(2025/06/06 現在)


