2025年6月20日
- DOBOT MG400
- ソフトウェア
- ハードウェア
DOBOT MG400 ROS(C++) 環境構築から実行まで
プログラム概要
本プログラムは左右にアームを動かすプログラムになります。
ループ処理をつかっているため、左、右、左・・・・・・と交互に繰り返し動作します。
システム構成概要
WindowsPC上にROS環境構築し、サンプルプログラムをビルドし、シミュレータ環境で実⾏します
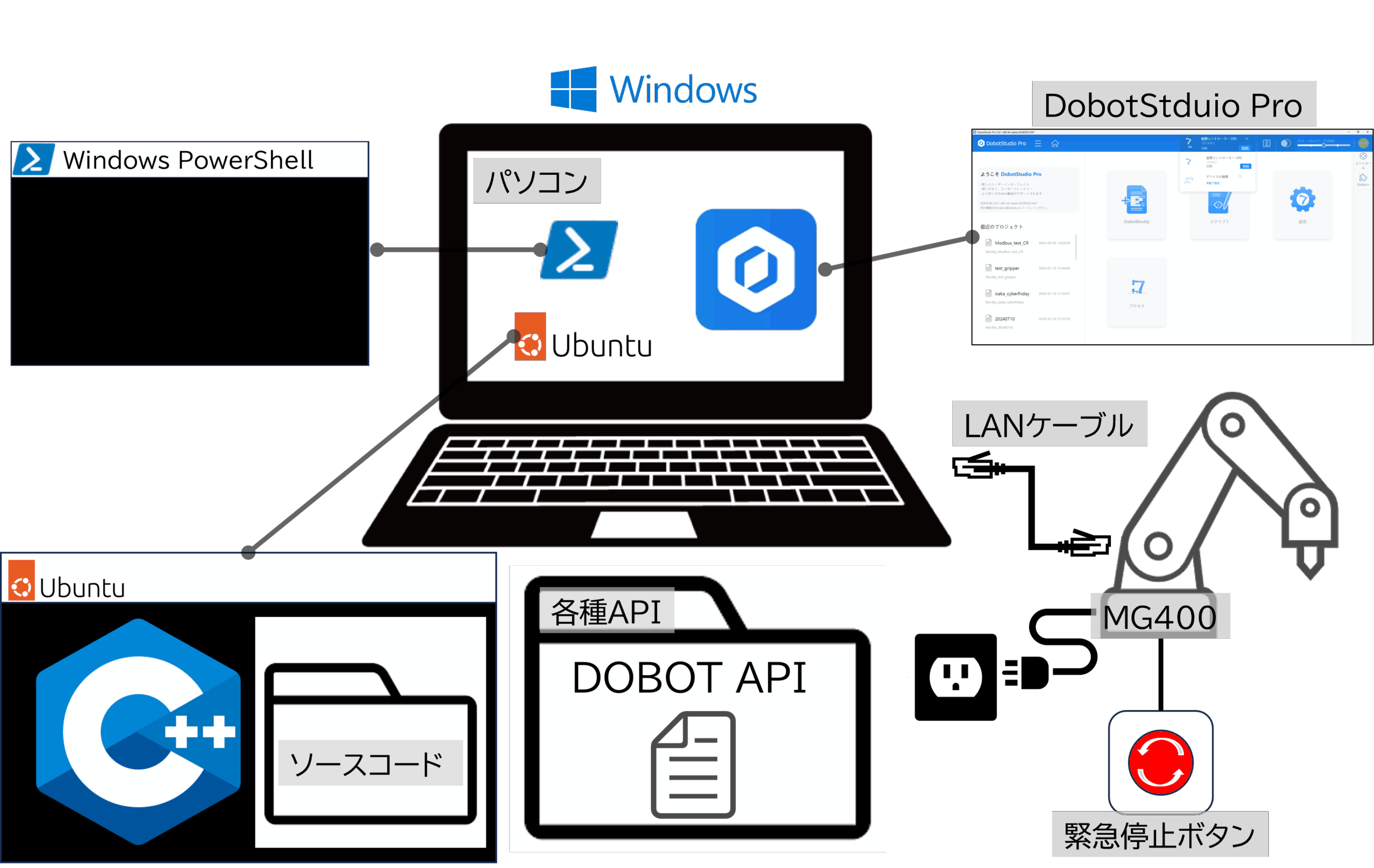
⽤意するもの
ハードウェア
- DOBOT MG400 (本マニュアルではMG400)
- WindowsPC (本マニュアルではWindows11)
・空きストレージ 10GB以上
・メモリ 8GB以上
ソフトウェア
- DobotStudio Pro バージョン2.8.3
- Windows PowerShell
- Ubuntu リリース20.04 LTS
- Robot Operating System 1 バージョンNoetic(以降ROSと表記)
- ソースコード
・ROS上でビルドし実⾏するプログラム
・https://github.com/Dobot-Arm/MG400_ROS
事前準備
- MG400を起動
- PCとMG400をLANケーブルで接続する
- コントローラーのLAN1に接続する
- DobotStudioProでMG400をEnableにする
- DobotStudioProの設定->リモコンからTCP/IP2回開発を選択し適応をクリックする
⼿順概要
- Ubuntuインストール
- ROSインストール
- シミュレータ環境ビルド
- シミュレータ実⾏
下記から詳細⼿順を参照します。
1. Ubuntuインストール
Windows PowerShellを管理者権限で起動し、下記コマンドを実⾏する
ディストリビューションをインストール
wsl --install -d Ubuntu-20.04
インストールまで10分ほどかかる場合があります。 また、インストール後再起動を求められた場合、PCを再起動しUbuntuを起動させてから次の⼿順に移ります。
ユーザー名とパスワードを設定
Installing, this may take a few minutes ... (省略) Enter new UNIX username:(任意のユーザー名を入⼒) New password:(任意のパスワードを入⼒) Retype new password:(設定したパスワードを入⼒)
下記のような表記になっていればUbuntuのインストールは完了です。
(ユーザー名)@(マシン名):~$
このまま⼿順2に移⾏します。
2. ROSインストール
Ubuntu上で下記コマンドを実⾏する
パッケージリスト更新
(ユーザー名)@(マシン名):~$ sudo apt update
対応したROSのライブラリのバージョンを確認
次のコマンドに必要なため下記コマンドでバージョンを確認します。
(ユーザー名)@(マシン名):~$ lsb_release -sc 出⼒例)focal
ROS専⽤リポジトリ追加
前のコマンドでの結果を反映させる。
(ユーザー名)@(マシン名):~$ sudo apt sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list‘
コマンド例)
(ユーザー名)@(マシン名):~$ sudo apt sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu focal main" > /etc/apt/sources.list.d/ros-latest.list'
curlコマンドインストール
(ユーザー名)@(マシン名):~$ sudo apt install curl
apt-keyの設定
(ユーザー名)@(マシン名):~$ curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
パッケージリスト再更新
(ユーザー名)@(マシン名):~$ sudo apt update
ROS Noetic インストール
(ユーザー名)@(マシン名):~$ sudo apt install ros-noetic-desktop-full
制御計画⽤フレームワークMoveitをインストール
(ユーザー名)@(マシン名):~$ sudo apt install ros-noetic-moveit
.bashrc へ環境設定を追加する
(ユーザー名)@(マシン名):~$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc (ユーザー名)@(マシン名):~$ source ~/.bashrc
ビルドツールをインストール
(ユーザー名)@(マシン名):~$ sudo apt-get install python3-catkin-tools (ユーザー名)@(マシン名):~$ sudo apt-get install python3-rosdep
rosdep初期化
(ユーザー名)@(マシン名):~$ sudo rosdep init (ユーザー名)@(マシン名):~$ rosdep update
ワークスペース⽤ディレクトリ作成
(ユーザー名)@(マシン名):~$ mkdir -p ~/catkin_ws/src (ユーザー名)@(マシン名):~$ cd ~/catkin_ws (ユーザー名)@(マシン名):~$ catkin init
下記のような表記になっていればワークスペースの作成は完了です。
--------------------------------------------------------- Profile: default Extending: [env] /opt/ros/noetic Workspace: /home/user/catkin_ws --------------------------------------------------------- Build Space: [missing] /home/user/catkin_ws/build Devel Space: [missing] /home/user/catkin_ws/devel Install Space: [unused] /home/user/catkin_ws/install Log Space: [missing] /home/user/catkin_ws/logs Source Space: [exists] /home/user/catkin_ws/src DESTDIR: [unused] None --------------------------------------------------------- (省略) Workspace configuration appears valid. ---------------------------------------------------------
3. シミュレータ環境ビルド
Ubuntu上で下記コマンドを実⾏する
ワークスペース⽤ディレクトリへ移動
(ユーザー名)@(マシン名):~$ cd $HOME/catkin_ws/src
githubからワークスペースをクローン
(ユーザー名)@(マシン名):~$ git clone https://github.com/Dobot-Arm/MG400_ROS
クローンしたワークスペースに移動
(ユーザー名)@(マシン名):~$ cd $HOME/catkin_ws
4. シミュレータ実⾏
ロボット接続
MG400のコントローラーのLAN1のIPアドレスを指定したサンプルコマンドです。
(ユーザー名)@(マシン名):~$ source $HOME/catkin_ws/devel/setup.bash (ユーザー名)@(マシン名):~$ roslaunch bringup bringup.launch robot_ip:=192.168.1.6
実⾏出来たら、この時rvizのシミュレータ画⾯が⾃動で起動しますが、そのまま次のコマンドに進みます。
シミュレータ起動
新しいUbuntuのウィンドウを起動し下記コマンドを実⾏する。 まずはワークスペースへcdコマンドで移動 します。
(ユーザー名)@(マシン名):~$ cd $HOME/catkin_ws
その後、プログラムを実⾏します。
(ユーザー名)@(マシン名):~$ source $HOME/catkin_ws/devel/setup.bash (ユーザー名)@(マシン名):~$ rosrun rosdemo rosdemo
シャットダウン⽅法
シミュレータ環境をシャットダウンするには、2つのUbuntuターミナル上でCtrl+Cキーを押し、プログラム を終了させます。
(2025/06/09 現在)


