2024年10月11日
- DOBOT NOVA Series
- ハードウェア
DOBOT NOVA series ハンドガイドモードの使い方
ハンドガイドモードを使うと、ロボットアームを手動で操作することが可能です。このモードではプログラムでの細かい設定が不要となるため、直感的に操作を行うことができます。
操作手順
- Dobot Studio Proに接続し、ロボットをイネーブル状態にします。

- ハンドガイドボタンを点滅するまで長押します。
このとき、関節が緩んでアームが落ちることがあるため、必ずアームを手で支えてください。
- インジケータライトが青点滅に変わり、Dobot Studio Pro上では、イネーブルボタンが光ります。この状態になればハンドガイドモードに切り替わっていますので、自由にアームを動かせるようになります。可動域内でゆっくり動かしてください。

また、ハンドガイドモード中は以下の警告文が出現し、Dobot Studio Proでの他の操作はできません。
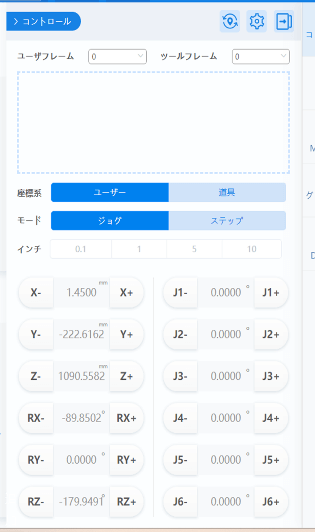
各ジョイントの可動域
NOVA5のジョイントの可動域は、以下のとおりです。
- J1 -360°~ +360°
- J2 -180°~ +180°
- J3 -160°~ +160°
- J4 -360°~ +360°
- J5 -360°~ +360°
- J6 -360°~ +360°
可動域を超えて無理に動かそうとすると故障の原因となりますので、 コントロールパネルを確認しながら操作してください。
- 任意の位置に移動したら、もう一度ハンドガイドボタンを押して位置を固定します。
(2024/10/11 現在)