2024年11月1日
- DOBOT NOVA Series
- ソフトウェア
- ハードウェア
DOBOT NOVA Series 指定位置に正確に移動しない場合の調整方法
設定された座標に不備がある可能性
座標(ポイント)を使用している場合
以下の項目について正しいか確認してください。
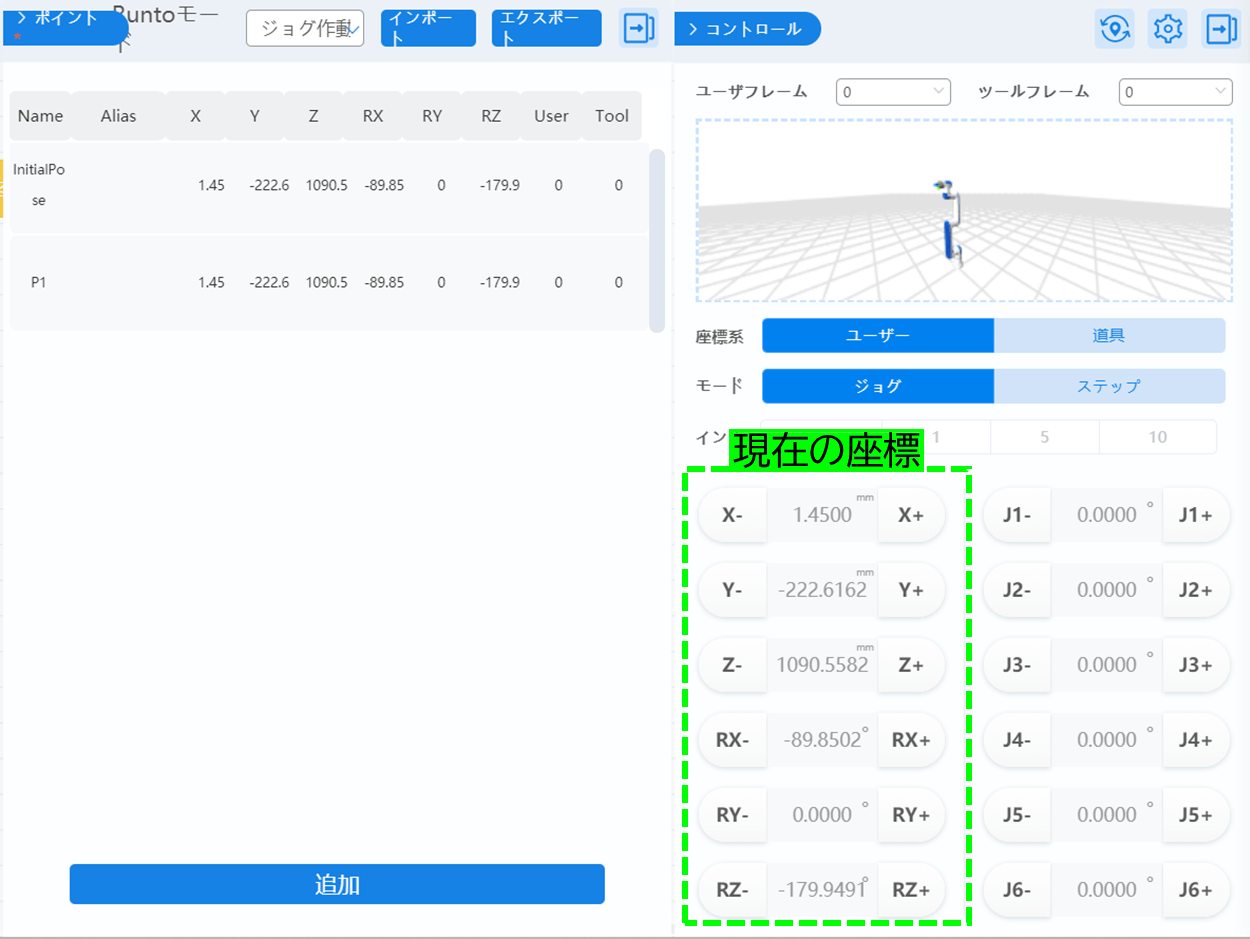
- 座標(ポイント)の数値
…コントロールパネルではリアルタイムで座標が表示されます。移動させたい場所と座標が一致しているか確認してください。
異なる場合は各座標の数値をクリックし修正するか、再度ポイントを指定しなおしてください。 - ツール座標系…Toolから座標系の番号があっているか確認してください。(デフォルトは0番)
- ユーザー座標系…Userから座標系の番号があっているか確認してください。(デフォルトは0番)
「相対」移動のブロックを使用している場合
「相対的なリニアモーション(ジョイントモーション)」は絶対座標ではなく、指定したポイントからの相対距離を指定します。座標を指定できるブロックではありませんのでご注意ください。

障害物と接触している可能性
通常NOVAは衝突検知機能により、障害物と衝突すると停止して、エラー文が表示されます。 しかし、衝突検知機能が低いレベルで設定されている場合、衝突検知が反応せず、NOVA本体 の位置がずれてしまうことがあります。
- 周りに障害物がないか
- 土台が固定されているか
- 衝突検知機能は安全レベル5に設定されているか
を確認してください。
衝突検知レベルの設定方法は下記の記事を参考にしてください。
原点位置がずれている可能性
絶対位置精度が保証できなくなるため、お客様ご自身でのキャリブレーションは推奨しておりません。もし原点位置を変更したい場合は、ユーザー座標系を使用することで、疑似的に原点位置を移動させることが可能です。
ファームウェアアップデート
以上に当てはまらない場合、ファームウェアアップデート行うことで改善される可能性があります。
ファームウェアアップデートは以下のリンクから
(2024/11/1 現在)