2024年10月11日
- DOBOT CR Series
- DOBOT M1 Pro
- DOBOT MG400
- ハードウェア
- 製品情報
DOBOT 4軸と6軸の違いと短所・長所
ロボットアームは人間の腕に例えて説明されることが多く、主に骨の役割を果たす「リンク」と関節の役割を担う「ジョイント」の2つで構成されています。
4軸ロボットアームなどの「軸」とは、ロボットアームの関節の数を指しています。 たとえば、6つの関節を持つ垂直多関節型ロボットアームは「6軸ロボット」と呼ばれ、人間の腕と同様に多方向へ自在に動かすことができます。軸の数が増えるほど、ロボットの操作で複雑になり、より多くの作業に対応できます。
4軸ロボットアームの特徴
得意な作業
6軸と比べて軸数が少ない為、制御が容易でロボット本体の剛性が高く、動作速度が機敏であることが多いです。 結果、単純な繰り返し作業を得意としています。
- 単純なピック&プレース作業 (搬送)
- パッケージング (梱包や仕分け)
不得意な作業
軸数が少ない為、複数の角度からのアプローチを必要とする作業には適していません。
- 複雑な組み立て作業
実際の作業例 [機種:DOBOT M1 Pro]
水平多関節ロボットのピック&プレースの様子
1

把持したいパーツの元まで移動
2

筒状パーツに刺し込み把持
3

そのまま持ち上げる
4

把持したまま画面奥へ移動
5

移動先でパーツを設置
6

筒状パーツを放し、移動完了
6軸ロボットアームの特徴
得意な作業
4軸と比べて軸数が多い為、3次元空間で位置や姿勢を自由に変えて人間と同等の作業を行うことが出来ます。
- 多角度からのアプローチを必要とする塗布や溶接
- 乱雑に配置された物の運搬
- 複雑な組み立て作業
不得意な作業
軸数が多く制御が困難であり、物を水平方向に移動させるだけなど単純な反復作業の場合には必要以上のコストがかかり不向きです。
- 単純な反復作業
実際の作業例 [機種:DOBOT CR5]
垂直多関節ロボットが液体の搬送を行う様子

アーム先端を回転させ、液体をゆっくり注ぐ
※ダイレクトティーチングで細かな角度を簡単に指定することが可能
1

初期位置は4軸と同様に、地面に対し垂直
2
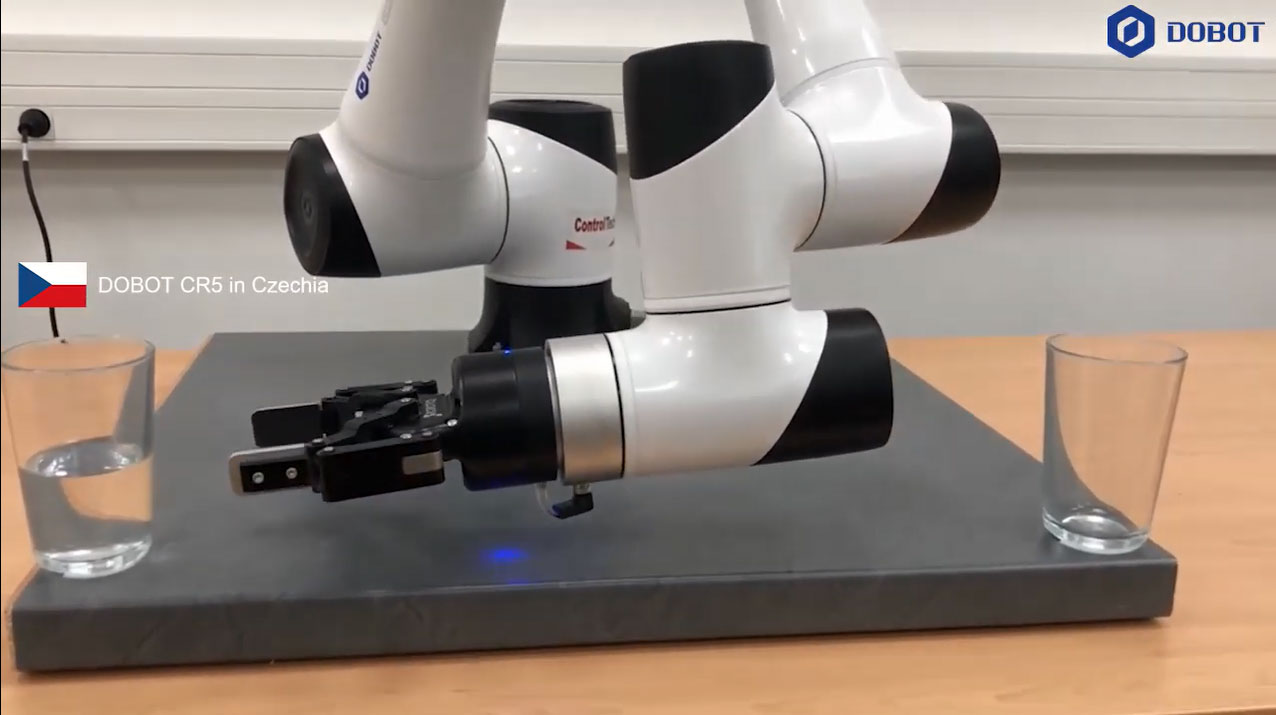
複数の関節を回転させ、コップを把持できる位置までアーム先端を移動
3
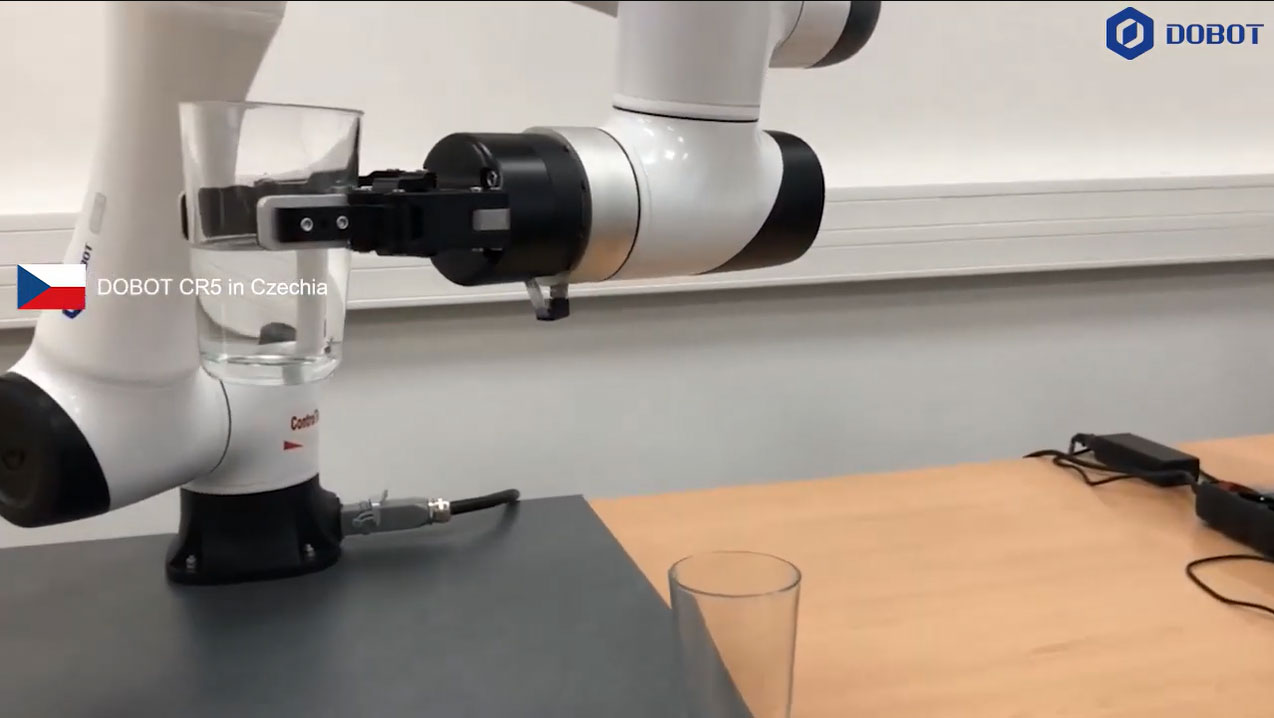
把持後、中の液体をこぼさないよう移動
4
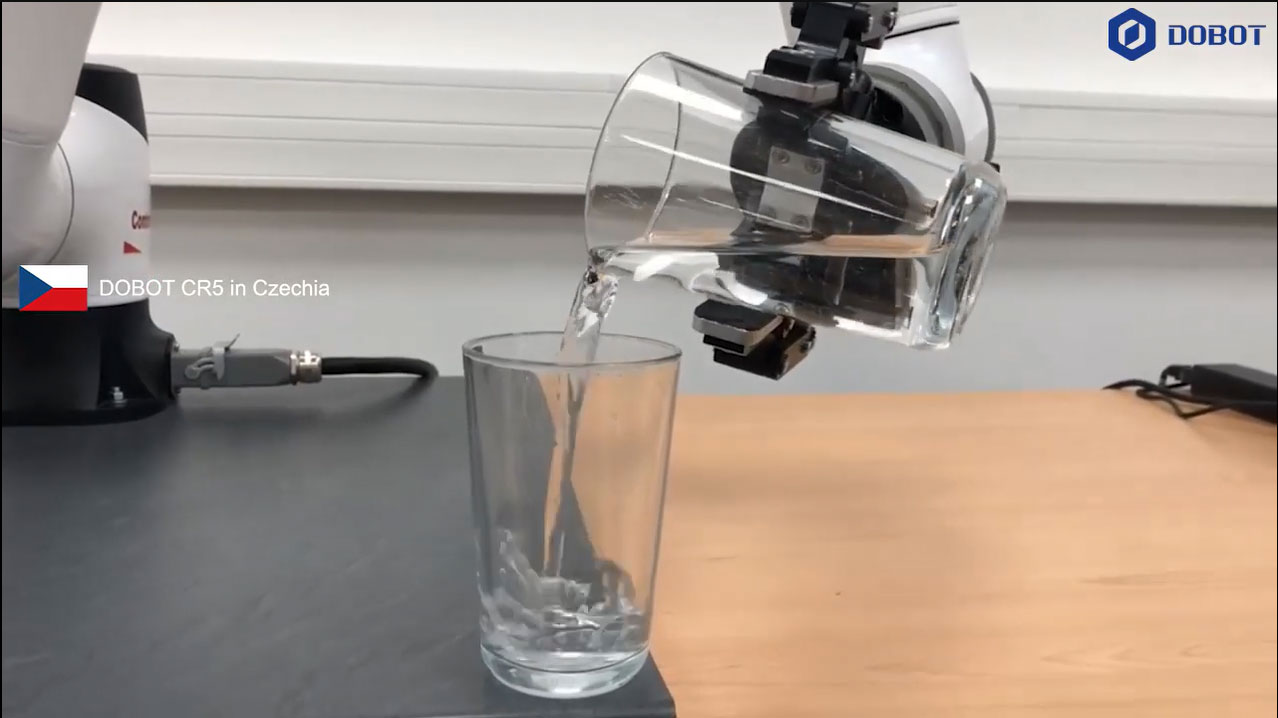
アーム先端を徐々に傾け、液体を注ぐ
得意・不得意の比較表
| 得意 | 不得意 | |
|---|---|---|
| 4軸 | 単純な反復作業や コストを重視する作業 | 複数の角度からのアプローチを 必要とする複雑な作業 |
| 6軸 | 多角度の柔軟な動作を求められる 複雑な作業 | 本来コストを必要としない 単純な反復作業 |
(2024/9/30 現在)


