2024年11月22日
- DOBOT CRA Series
- ハードウェア
DOBOT CRA Series ティーチング&プレイバックの使い方
ティーチング&プレイバックとは
ティーチング&プレイバック(Teaching & Playback)とは、CRAの操作方法の一つで、期待する動きを手動でロボットアームに教え、その動きを自動で再現させる技術です。この方法は、産業用ロボットや自動化システムで広く使用されています。 ポイント指定ではロボットが最短距離で動きますが、ティーチング&プレイバック機能では必ずしも最短距離を取らず、記録された軌道に従います。この機能を使えば、障害物を避けるなどの複雑な経路設定が可能です。
ティーチング&プレイバック手順
- Dobot Studio Pro と接続しイネーブル状態にしてください
- 本体の【軌道記録ボタン】を押します。インジケーターライトが黄色に点灯したら起動記録モードです。
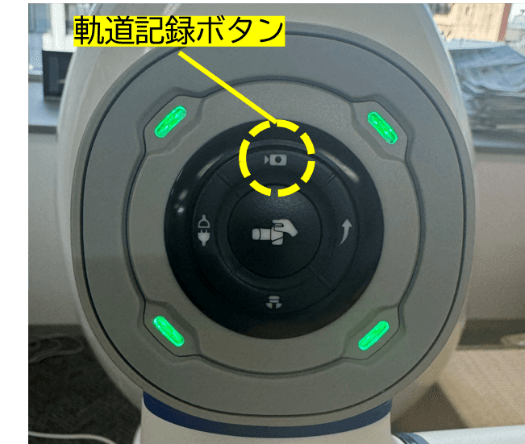
- 任意の経路に沿って、手でゆっくり動かしてください。
- 動かし終わったら再度【軌道記録ボタン】を押してください。インジケータライトが緑に点灯(イネーブル状態)したら、記録が完了です。
- 記録した動きを再現するには、【軌道プレイバックボタン】を1秒押してください。再現中はインジケータライトが緑色でゆっくり点滅します。

※再現中にコントロールパネルなどを操作するとエラーが発生するため、再現が終了してから操作を行ってください。

Dobot Studio Pro 4.5でのティーチング&プレイバック手順
アプリ上でもティーチング&プレイバックを行うことができます。
- Dobot Studio Pro 4.5 を開き、CRAと接続します。
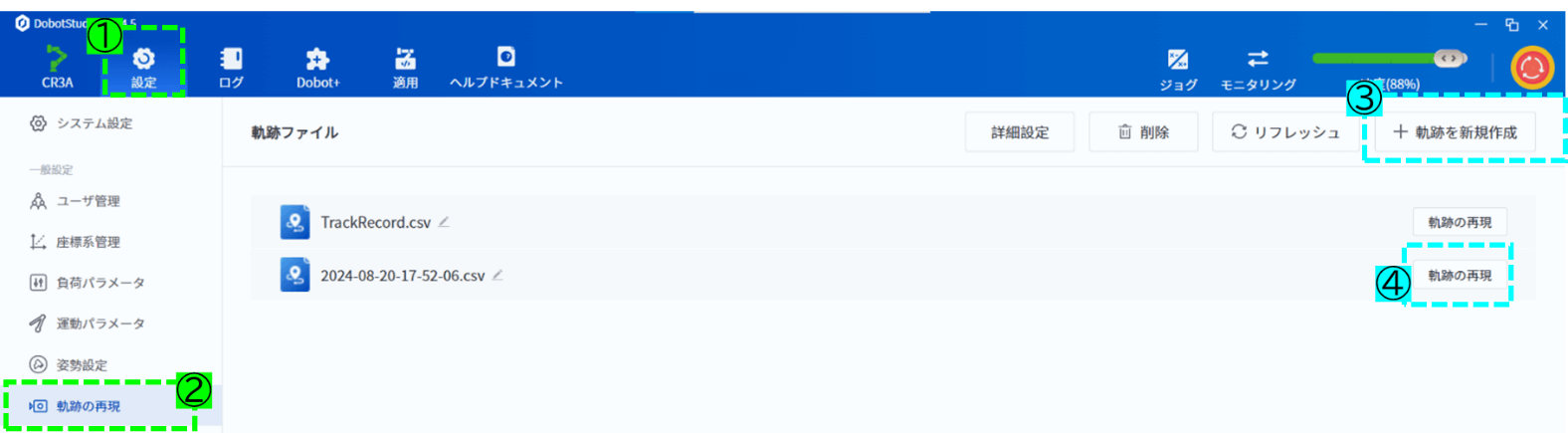
- ①【設定】→②【軌跡の再現】を開けると、ポイント座標作成画面に移動します。
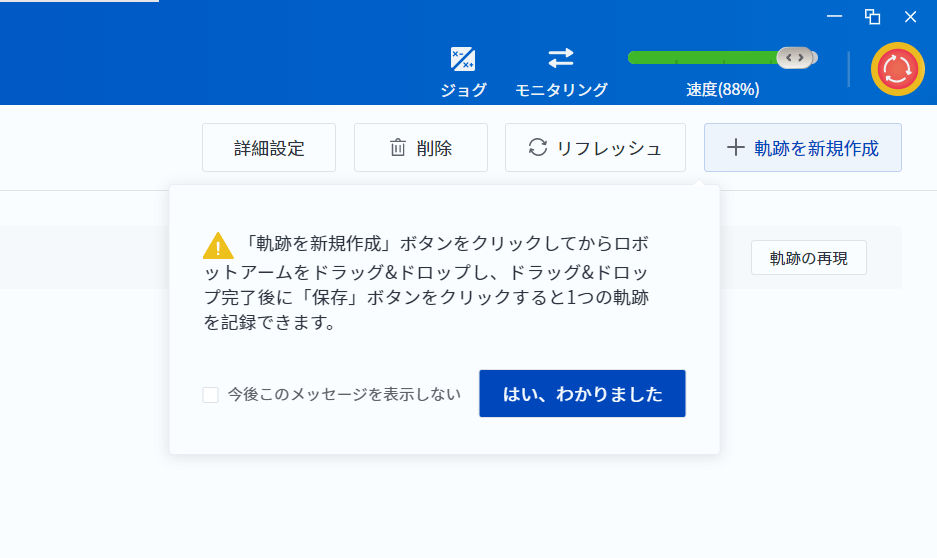
- ③【+軌跡を新規作成】を選択すると本体がハンドガイドモードに入りますので、自由に動かしてください。
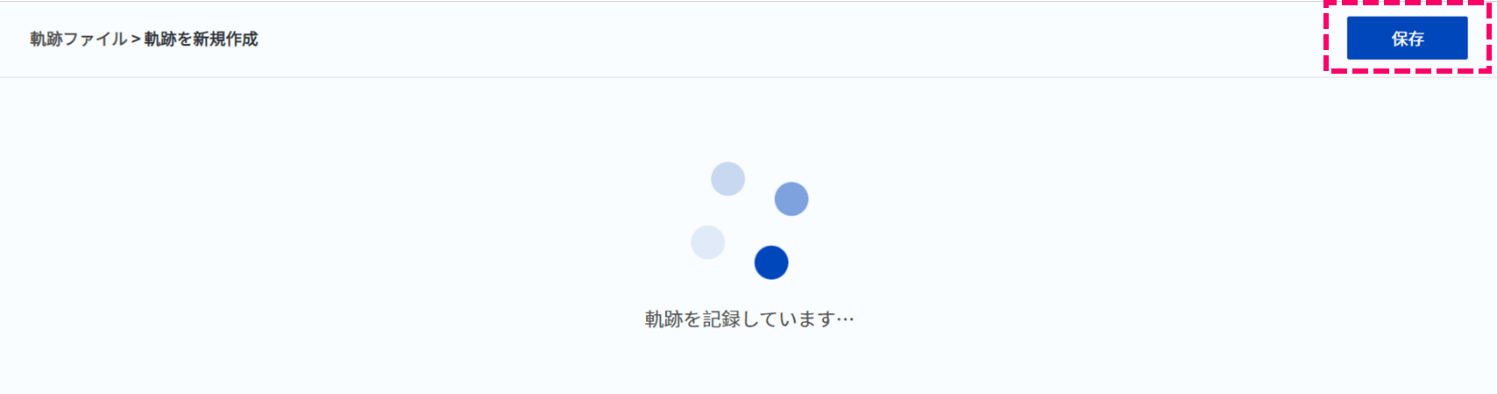
- 軌跡を記録中は以下のような画面が表示されます。移動が終了したら【保存】をクリックしてください。
- 保存された軌跡は軌跡ファイルに追加されます。④【軌跡の再現】を選択することでプレイバックが可能です。
プログラムに組み込む
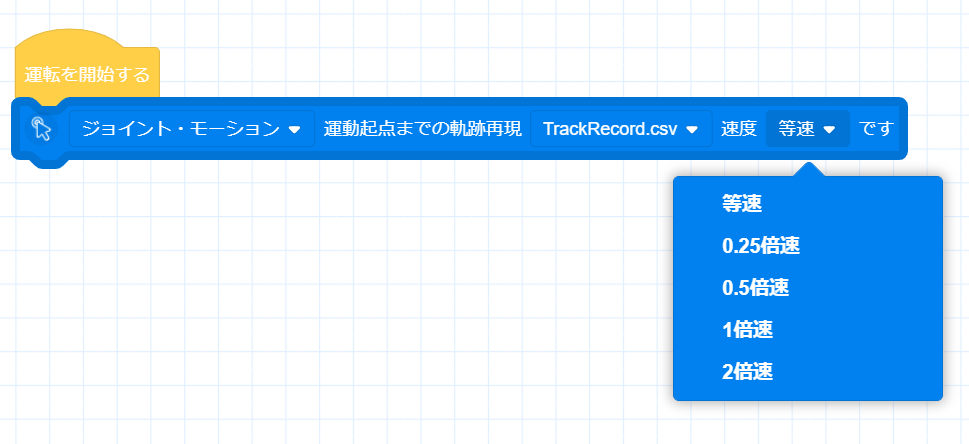
Blocklyを使用して以下のブロックを使うと、プログラムに記録した動きを組み込むことができます。また、スピードの設定も可能です。
ティーチング&プレイバックの特徴
メリット
- プログラミングを直接記入する必要がないため、初心者でも使いやすい。
- 障害物を避けるための複雑な経路設定が可能。
デメリット
- 手動のため細かい調整は難しい。
応用例
(2024/11/22 現在)